量子激光雷达原型在完全浸没在水下时获得实时3D图像
发布时间:2023-05-05 00:00:00.000Z
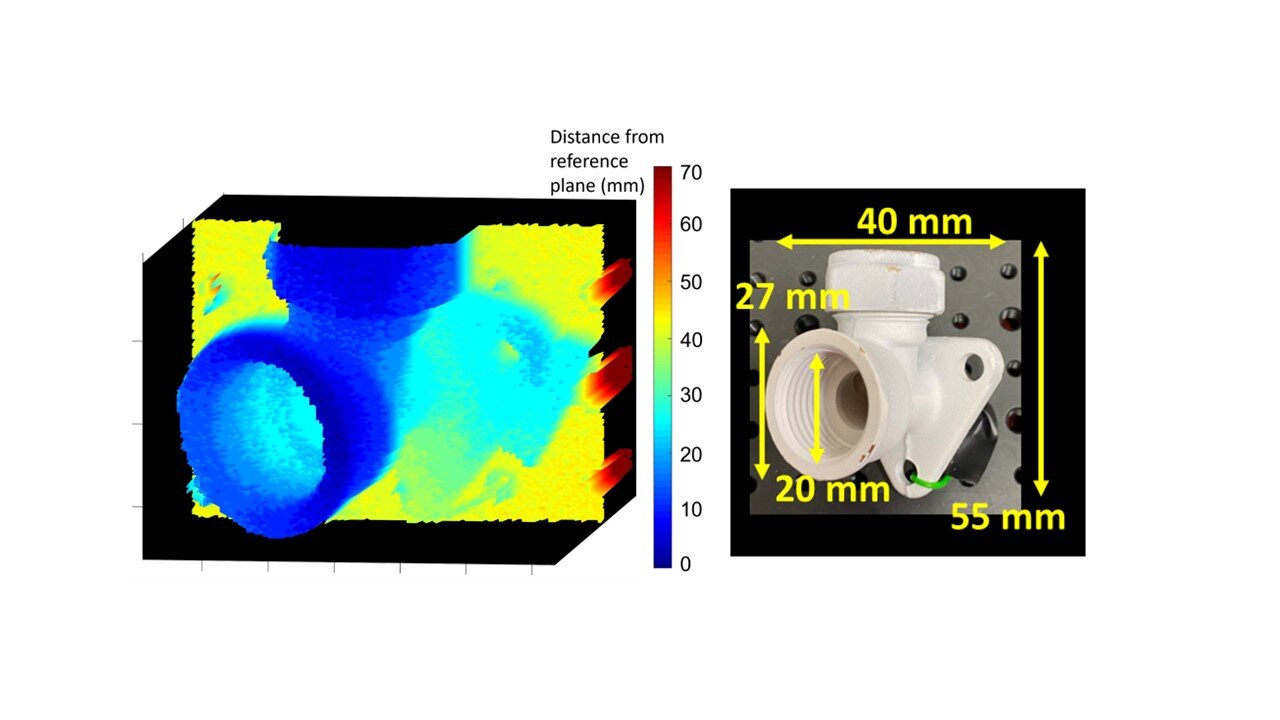
研究人员开发了一个使用量子探测技术的激光雷达系统,该系统可以在潜入水下时捕捉三维图像。他们通过使用该系统捕捉管道(右)的3D图像(左)来演示该系统。该扫描是在低散射条件下获得的,单光子系统浸没在一个水箱中。资料来源:Aurora Maccarone,赫瑞瓦特大学
研究人员首次展示了一个原型激光雷达系统,该系统利用量子探测技术在潜入水下时获取三维图像。该系统的高灵敏度可以使其即使在水下发现的极低光照条件下也能捕捉到详细的信息。
"研究小组成员、来自英国赫瑞瓦特大学的皇家工程院研究员Aurora Maccarone说:"这项技术可能对广泛的应用很有用。"例如,它可以用来检查水下设施,如水下风电场电缆和涡轮机的水下结构。水下激光雷达也可用于监测或勘察水下考古遗址,并用于安全和国防应用。"
通过海水获得三维图像可能是一个挑战,因为它是受光限制的,水中的任何颗粒都会散射光线并使图像变形。然而,单光子检测,这是一种基于量子的技术,允许非常高的穿透力,甚至在低光照条件下也能工作。
在《光学快报》上,来自赫瑞瓦特大学和爱丁堡大学的研究人员描述了整个单光子激光雷达系统被淹没在一个大水箱中的实验。与研究小组早期的水下单光子探测实验相比,新的演示使该技术更接近于实际应用,这些实验是在精心控制的实验室条件下进行的,光学装置放在水箱外,数据分析是离线进行的。
他们还实施了新的硬件和软件的开发,使系统获得的3D图像可以实时重建。
"这项工作旨在使量子探测技术可用于水下应用,这意味着我们将能够在非常低的光线条件下对感兴趣的场景进行成像,"Maccarone说。"这将影响到海上电缆和能源装置的使用,而这些装置是大家都在使用的。这项技术还可以在没有人类在场的情况下进行监测,这将意味着减少污染,减少对海洋环境的侵害。"
更快的弱光探测
激光雷达系统通过测量激光从场景中的物体反射到回到系统的接收器所需的时间(称为 "飞行时间")来创建图像。在新的工作中,研究人员试图开发一种方法来获取被浊水掩盖的目标的三维图像,因此传统的激光雷达成像系统是看不到的。
他们设计了一个激光雷达系统,使用一个绿色脉冲激光源来照亮感兴趣的场景。反射的脉冲照明被一个单光子探测器阵列检测到,这允许超快的低光检测,并大大减少了在光子饥饿环境中的测量时间,如高衰减的水。
"Maccarone说:"通过采取具有皮秒时间分辨率的飞行时间测量,我们可以常规地解决场景中目标的毫米级细节。"我们的方法还允许我们将目标反射的光子与水中颗粒反射的光子区分开来,这使得它特别适合在高度浑浊的水域中进行三维成像,因为光学散射会破坏图像对比度和分辨率"。
事实上,这种方法需要数以千计的单光子探测器,所有这些探测器每秒产生数百个事件,这使得在短时间内检索和处理重建三维图像所需的数据极具挑战性,特别是对于实时应用。为了解决这个问题,研究人员开发了专门用于在高散射条件下成像的算法,并将其与广泛可用的图形处理单元(GPU)硬件结合起来应用。
这项新技术建立在一些重要技术进步的基础上。"赫瑞瓦特大学在单光子检测技术和单光子数据的图像处理方面有着长期的记录,这使我们能够在极具挑战性的条件下展示先进的单光子成像,"Maccarone说。
"爱丁堡大学在单光子雪崩二极管检测器阵列的设计和制造方面取得了根本性的进展,这使我们能够在量子检测技术的基础上建立紧凑和强大的成像系统。"
水下测试
在实验室的光学平台上优化了光学设置后,研究人员将激光雷达系统连接到一个GPU上,以实现数据的实时处理,同时还实施了一些三维成像的图像处理方法。一旦系统工作正常,他们就把它移到一个长4米、宽3米、深2米的水箱里。
当系统浸没在水中时,研究人员以一种可控的方式添加散射剂,使水更加浑浊。在三个不同的浊度水平的实验表明,在受控的高散射情况下,在3米的距离内成功成像。
"Maccarone说:"单光子技术正在迅速发展,我们已经在水下环境中展示了非常有希望的结果。"该方法和图像处理算法也可用于更广泛的场景,以改善自由空间的视觉,如雾、烟或其他遮蔽物中的视觉。"
研究人员现在正在努力缩小该系统的尺寸,以便它可以被集成到水下车辆中。通过英国量子技术中心网络和InnovateUK,研究人员正在与工业界合作,使该技术可用于一系列水下应用。
参考资料:Aurora Maccarone et al, Submerged single-photon LiDAR imaging sensor used for real-time 3D scene reconstruction in scattering underwater environments, Optics Express (2023). DOI: 10.1364/OE.487129
